Calculus I: Appendix-E: Derivation of the dot product and the projection vectors
1) The dot product:
-
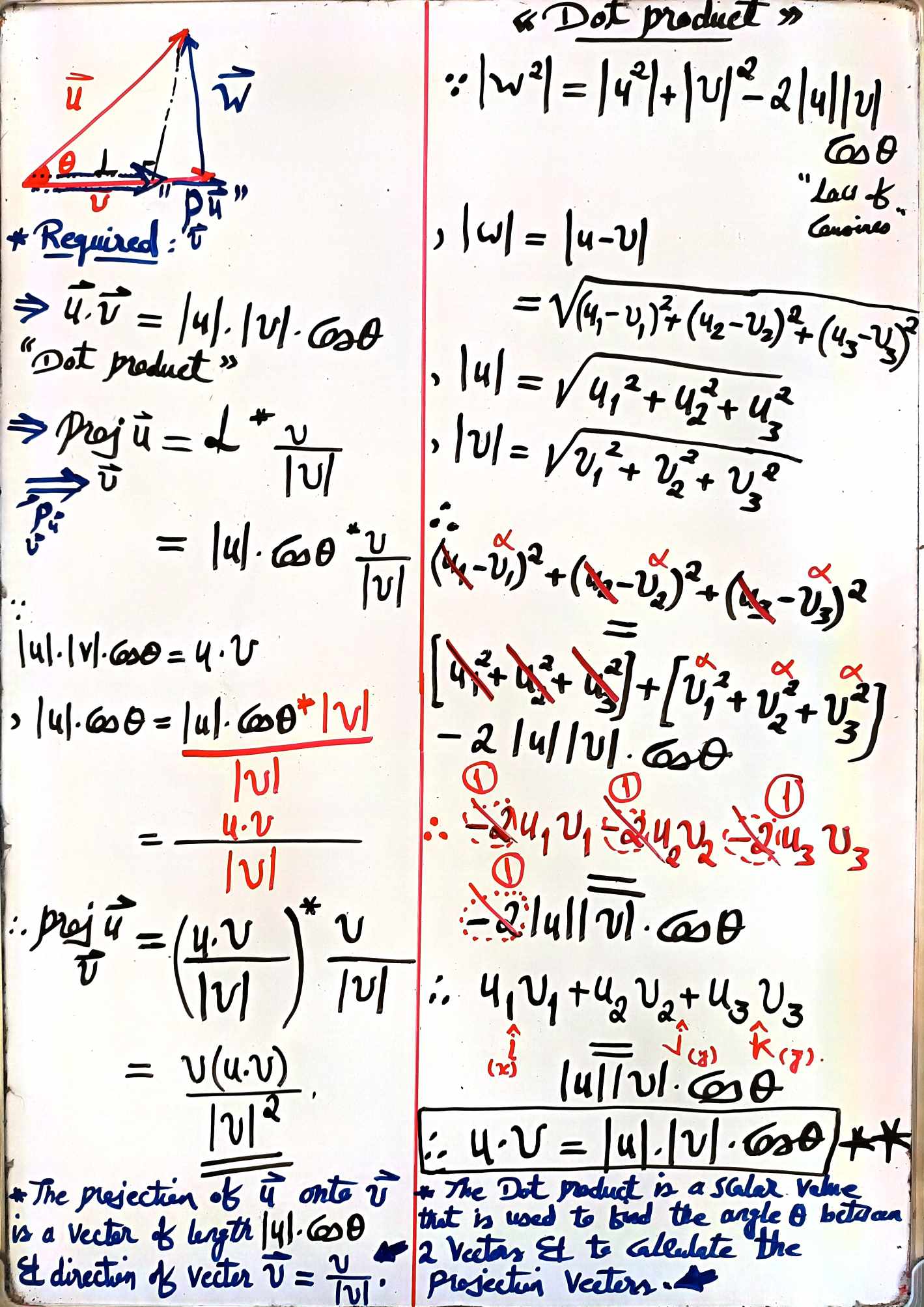
Recall, 2 intersecting vectors $u$ and $v$ together with the resultant vetcor $w$; such that, \(w = u - v\)
-
From the “Law of Cosines”:
- By back-substitution in $Lemma.01$:
- And, by definition $({u_x}{v_x} + {u_y}{v_y} + {u_z}{v_z})$ yields $u.v$, the dot product or the inner product.
2) Projection vectors:
-
Definition: The projection vector $\vec{proj_{\vec{v}}} \vec{u}$ of a vector $\vec{u}$, is the vector component of that vector, that is coincident to the projectile vector $\vec{v}$, multiplied by the unit vector of the projectile vector (i.e., the direction).
-
For a productive proof, let vector $\vec{u}$ be our target vector, the one we would like to find its vector components in the direction of another contigous vectors, and vector $\vec{v}$ be the projectile (aka. base) vector the one we would like to utilize its direction to find the projection vector.
| 1) Finding the norm of the vector component $ | \vec{u_x} | $ that is coincident to the projectile vector $\vec{v}$: |
| 2) Finding the vector norm $ | \vec{v} | $ of the projectile vector $\vec{v}$: |
| 3) Finding the normalization ratio using the scalar division property $\vec{v_{unit}}=\vec{v}/ | \vec{v} | $ of the projectile vector (base vector). |
| 4) Using the scalar multiplication property $ | \vec{u_x} | *\vec{v_{unit}}$: |
\[||\vec{u_x}||*\vec{v_{unit}}=(||\vec{u}||*cos(\theta))\*\vec{v_{unit}}\] \[Since,\vec{u}.\vec{v}=||\vec{u}||*||\vec{v}||\*cos(\theta)\]$Lemma.01$
\[Then,||\vec{u}||*cos(\theta)=(\vec{u}.\vec{v})/||\vec{v}||\]$Lemma.02$
5) Then, from $Lemma.01$ and $Lemma.02$, we can deduce the projection vector formula in terms of the dot product between 2 vectors as follows:
\[\vec{proj_{\vec{v}}}\vec{u}=[({\vec{u}}.{\vec{v}})*{\vec{v_{unit}}}]/||\vec{v}||\]6) Another formula when $\vec{v_{unit}}$ is broken:
\[\vec{proj_{\vec{v}}}\vec{u}=[\vec{u}.\vec{v}*\vec{v}]/||\vec{v}||^2\]Note:
- This is could be applied to other components of vector $\vec{u}$, the $\vec{u_y}$, and the $\vec{u_z}$, and any vector could be utilized as the base or the projectile vector.
- The projection vector of vector $\vec{u}$ on itself $\vec{proj_{\vec{u}}} \vec{u}$ is the vector $\vec{u}$ itself scaled with the length of one of its vector components.
3) Usages Review:
1) Finding the work done by a force vector $(F)$ to move an object a displacement $(D)$ with an inscribed angle $(a)$, formula (Physics):
\[W = F.D = ||F|| * ||D|| * cos(a) = \sum_{i=0}^{n} u_i v_i = u_0 v_0+u_1 v_1+u_2 v_2+...+ u_{n-1} v_{n-1} + u_n v_n\]2) Finding the inscribed angle (<a) between 2 intersecting vectors, formula:
\[m(a) = acos(u.v/(||u|| * ||v||))\]where u.v can be evaluated using the Riemann’s sum formula (Trigo./Physics).
| 3) Finding whether 2 intersecting vectors are orthogonal, formula: $u.v = | u | * | v | * cos(PI/2) = ZERO.$ (Geometry). |
4) Finding projection vectors, formula: “the vector projection of $u$ onto $v$”, formula:
\[proj_{v}^{u} = (||u|| * cos(a)) * (v/||v||) = (u.v / ||v||^2) * v\]
where $( u * cos(a))$ is the length of the triangle base, and $(v/ v )$ is the unit vector form (normalized) of $v$.
5) Finding the total electromotive force (EMF) in a closed circuit loop, formula (aka. Ohm’s Law):
\[V = I * R * cos(0)\]6) Finding the driving arterial blood pressure in a closed arterial circuitry, formula (Hemodynamics):
\[BP = CO * SVR * cos(0)\]References:
- Thomas’ Calculus $14^{th}e$: Ch.12 Vectors & Geometry of Space: Section.12.3. (The Dot Product).
- Guyton and Hall Textbook of Medical Physiology $13^{th}e$
- Applied Linear Algebra $2^{nd}e$ Springer
Our Features

Distributed Simulation
An overview of distributed simulation systems.

NASA DSES Project
Insights into the Distributed Space Exploration Simulation System project of NASA.

Educational Applications
How educational institutions can benefit from simulation systems.

Scalable Solutions
Implementing scalable solutions for various needs.
Contacts:
Name
Pavly Gerges
pepogerges33@gmail.com
Tel
Address
Egypt, Cairo